Flow Through Trees¶
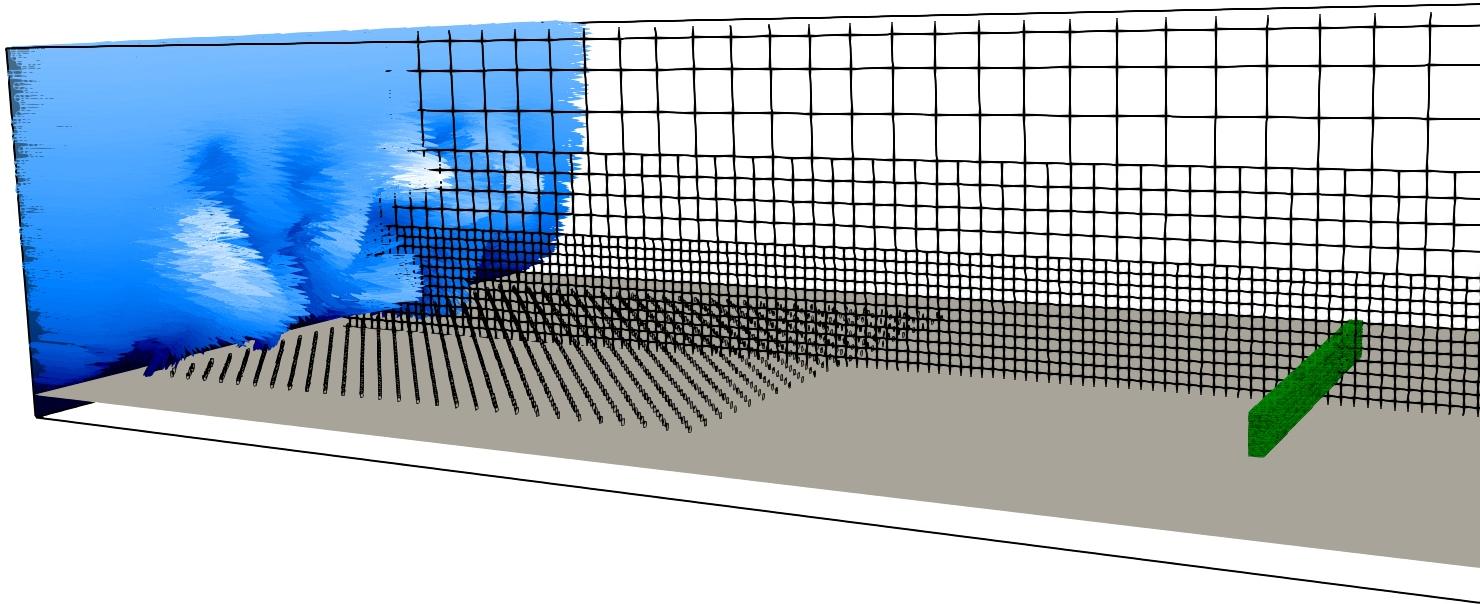
The simulation of a turbulent flow over an arrangement of trees is used as validation for the points cloud implementation with immersed boundary method. The points cloud is distributed in an Cartesian arrangement with a distancing between points of 1 node of most refined lvl. The points area is the squared distance between points at lvl 0. For comparison, the results of Qi and Ishihara, 2018 and Kang et al., 2020 were used.
It consists of a 2 x 74 x 6(m) tree arrangement positioned at 1m height after an atmospheric flow. The drag coefficient is estimated 1.6 and LAD=\(1.16m^{-1}\) hence the force_factor will be 1.856 for \(\Delta x\)=1m (and 0.468 for \(\Delta x\)=0.25m), as illustrated below:

The numerical setup goal is to correctly capture both velocity and turbulent kinetic energy changes caused by the tree arrangement. The domain setup is shown below:
[1]:
from nassu.cfg.model import ConfigScheme
filename = "./tests/validation/cases/10_flow_through_trees.nassu.yaml"
sim_cfgs = ConfigScheme.sim_cfgs_from_file_dct(filename)
[2]:
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from pathlib import Path
from tests.validation.notebooks import common
common.use_style()
H_num = 7
scale = 1
Load experimental data:
[3]:
base_path = Path("./tests/validation/comparison/Tree_effect/qi2018/exp")
positions = ["1H", "2H", "3H", "4H", "5H"]
df_exp = []
vel = pd.read_csv(base_path / "velocity/pitot.csv")
kin = pd.read_csv(base_path / "kinetic_energy/pitot.csv")
df_csv = pd.concat([vel, kin], axis=1, join="inner")
df_exp.append(df_csv)
for pos in positions:
vel = pd.read_csv(base_path / f"velocity/{pos}.csv")
kin = pd.read_csv(base_path / f"kinetic_energy/{pos}.csv")
df_csv = pd.concat([vel, kin], axis=1, join="inner")
df_exp.append(df_csv)
[4]:
base_path = Path("./tests/validation/comparison/Tree_effect/qi2018/num")
positions = ["1H", "2H", "3H", "4H", "5H"]
df_num2 = []
vel = pd.read_csv(base_path / "velocity/pitot.csv")
kin = pd.read_csv(base_path / "kinetic_energy/pitot.csv")
df_csv = pd.concat([vel, kin], axis=1, join="inner")
df_num2.append(df_csv)
for pos in positions:
vel = pd.read_csv(base_path / f"velocity/{pos}.csv")
kin = pd.read_csv(base_path / f"kinetic_energy/{pos}.csv")
df_csv = pd.concat([vel, kin], axis=1, join="inner")
df_num2.append(df_csv)
Results¶
[5]:
sim_cfg = sim_cfgs["flowThroughTrees", 0]
point_ref = sim_cfg.output.series["velocities"].points["velocity_probe"]
df_ref = point_ref.read_full_data("ux")
df_ref = df_ref[df_ref["time_step"] > 10000]
df_point = df_ref
ux_avg = df_ref.mean()
ux_rms = df_ref.std()
Iu = ux_rms / ux_avg
u_ref = ux_avg[1]
u_ref
/tmp/ipykernel_2256479/3034823928.py:14: FutureWarning: Series.__getitem__ treating keys as positions is deprecated. In a future version, integer keys will always be treated as labels (consistent with DataFrame behavior). To access a value by position, use `ser.iloc[pos]`
u_ref = ux_avg[1]
[5]:
np.float32(0.027458204)
[6]:
def line_stats(position: str, u_ref) -> pd.DataFrame:
line_ref = sim_cfg.output.series["velocities"].lines[f"{position}"]
df_ux = line_ref.read_full_data("ux")
df_uy = line_ref.read_full_data("uy")
df_uz = line_ref.read_full_data("uz")
df_ux = df_ux[df_ux["time_step"] > 10000]
df_uy = df_uy[df_uy["time_step"] > 10000]
df_uz = df_uz[df_uz["time_step"] > 10000]
ux_avg = (df_ux.mean()) / u_ref
ux_rms = (df_ux.std()) ** 2
uy_rms = (df_uy.std()) ** 2
uz_rms = (df_uz.std()) ** 2
k = (ux_rms + uy_rms + uz_rms) / (2 * u_ref**2)
df = pd.DataFrame({"ux_avg": ux_avg, "k": k})
df = df.drop(df.index[0])
df["pos"] = np.linspace(0, (2 * H_num) / H_num, num=len(df), endpoint=True)
return df
[7]:
df_num = []
df_csv = line_stats("velocity_profile", u_ref)
df_num.append(df_csv)
for pos in positions:
df_csv = line_stats(f"pos_{pos}", u_ref)
df_num.append(df_csv)
[8]:
def plot_curves(position: str, df_num, df_num2, df_exp):
fig, ax = common.fig_double()
fig.suptitle(f"{position}")
ax[0].plot(df_num["ux_avg"], df_num["pos"], **common.markers.sim_line(), label="AeroSim")
ax[0].plot(
df_num2["u"],
df_num2["z"],
color=common.colors.blue,
linestyle="--",
label="Qi and Ishihara (2018)",
)
ax[0].plot(df_exp["u"], df_exp["z"], **common.markers.exp(shape="o"), label="Exp")
ax[0].set_ylabel("$z/H$")
ax[0].set_xlabel("$u/u_{H}$")
ax[0].set_xlim(0, 2.0)
ax[0].set_ylim(0, 1.2)
ax[0].legend(loc="best")
ax[1].plot(df_num["k"], df_num["pos"], **common.markers.sim_line(), label="AeroSim")
ax[1].plot(
df_num2["k"],
df_num2["h"],
color=common.colors.blue,
linestyle="--",
label="Qi and Ishihara (2018)",
)
ax[1].plot(df_exp["k"], df_exp["h"], **common.markers.exp(shape="o"), label="Exp")
ax[1].set_ylabel("$z/H$")
ax[1].set_xlabel("TKE/$u_{H}^{2}$")
ax[1].set_xlim(0, 0.2)
ax[1].set_ylim(0, 1.2)
ax[1].legend(loc="best")
plt.tight_layout()
plt.show(fig)
[9]:
## Inflow plot
plot_curves("Inflow", df_num[0], df_num2[0], df_exp[0])
## Post obstacles plots
for i, pos in enumerate(positions):
plot_curves(pos, df_num[i + 1], df_num2[i + 1], df_exp[i + 1])
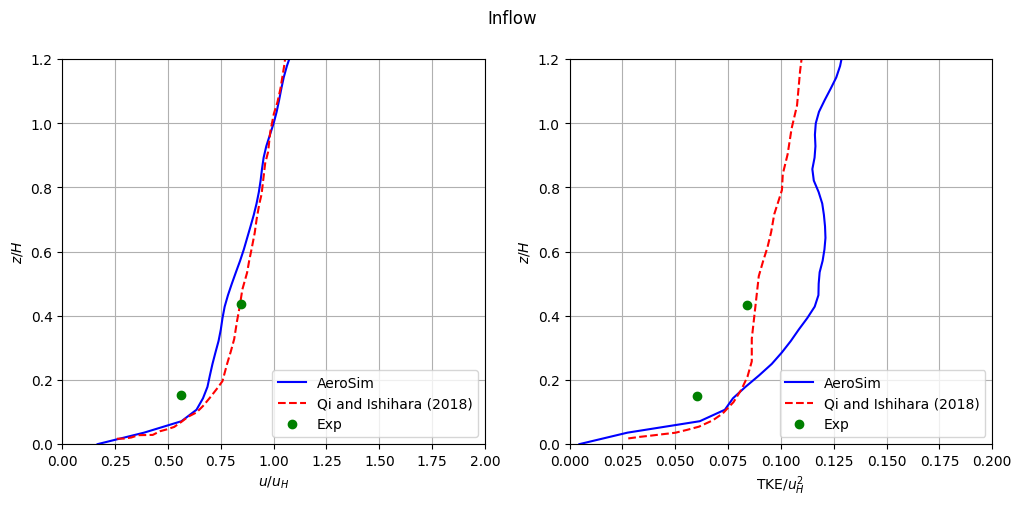
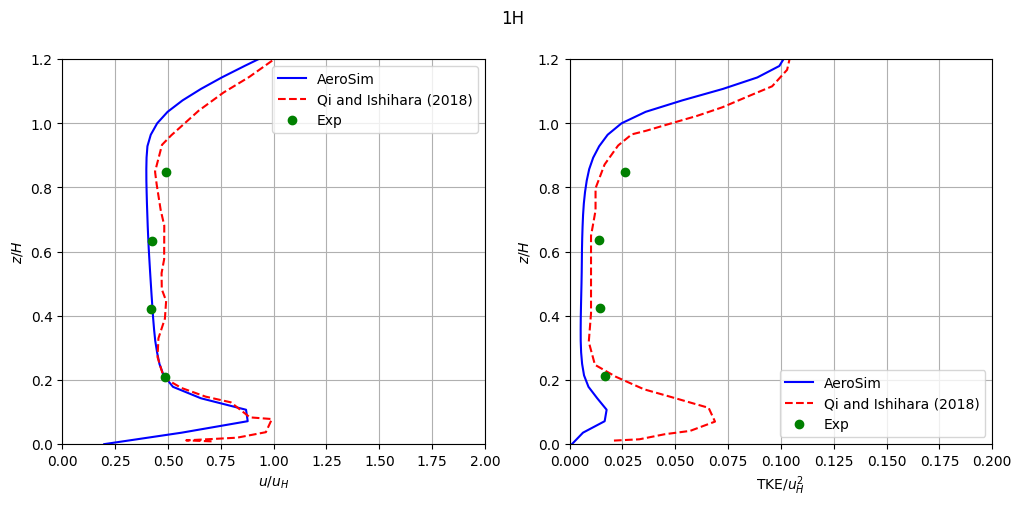
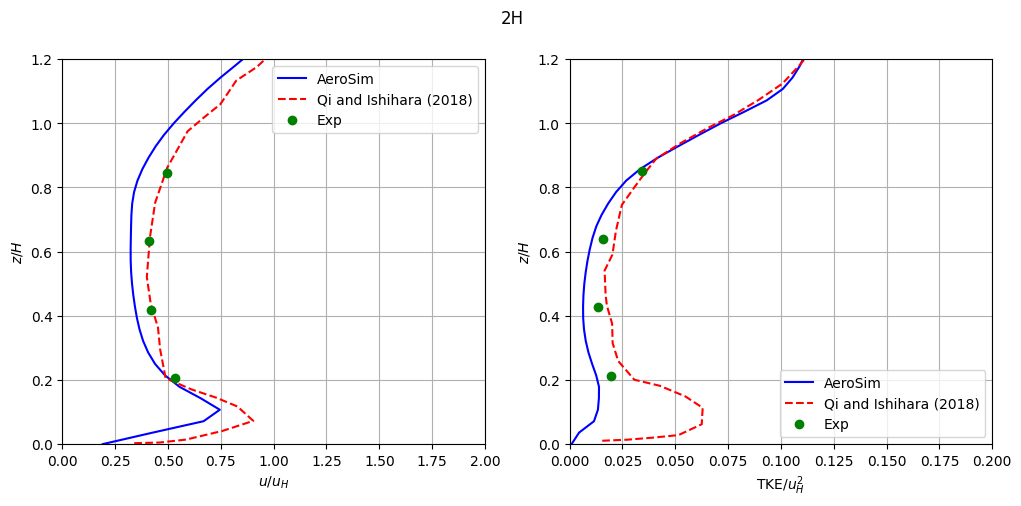
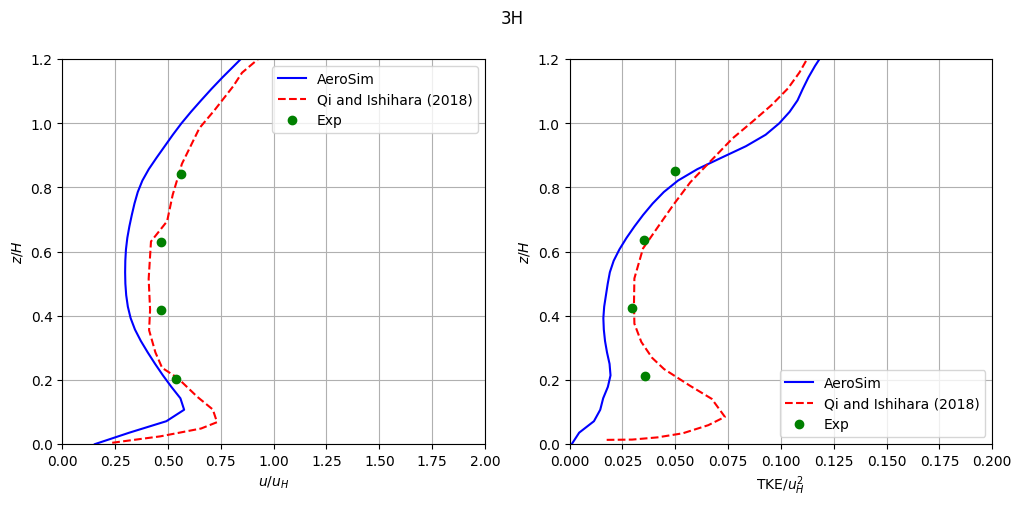
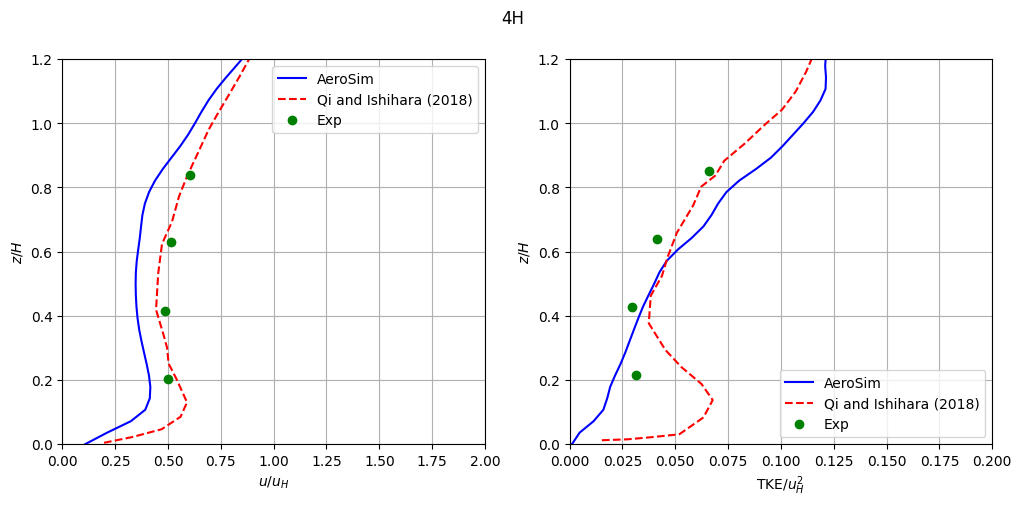
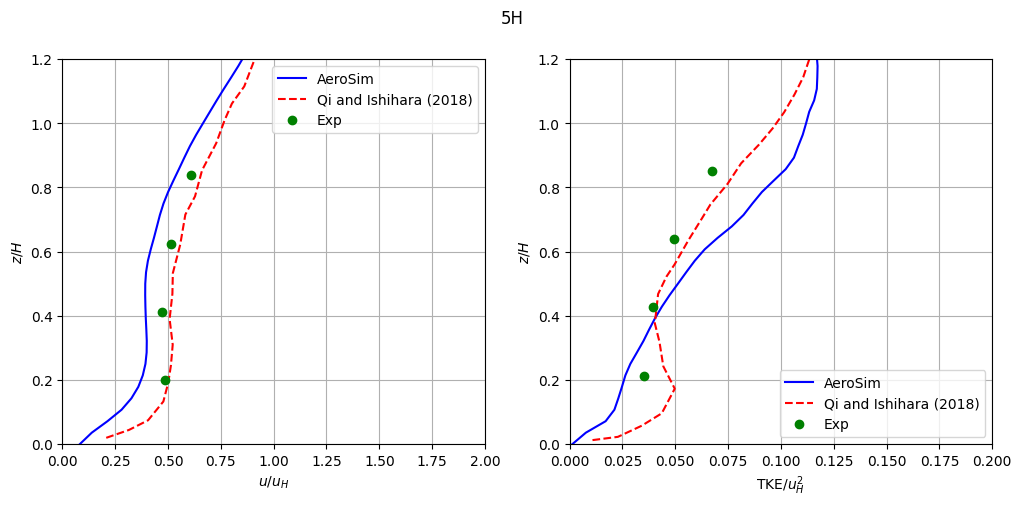
It can be seen a satisfactory match between inflow and experimental data despite the coarse resolution applied on the validation case. The qualitative aspects of the flow profile after the tree arrangement are well reproduced and quantitative aspects also have a decent representation. The difference compared to Qi and Ishihara results might be due our resolution of 0.25m against their 0.025m close to the ground.
Version¶
[10]:
sim_cfg = next(iter(sim_cfgs.values()))
sim_info = sim_cfg.output.read_info()
nassu_commit = sim_info["commit"]
nassu_version = sim_info["version"]
print("Version:", nassu_version)
print("Commit hash:", nassu_commit)
Version: 1.6.45
Commit hash: d28133f0c29a359efb034c038459e8185c1345db
Configuration¶
[11]:
from IPython.display import Code
Code(filename=filename)
[11]:
variables:
domain:
scale: !math 1/1
plane_height: 4.0
body_pos: 200
H_ref:
pos_025H: !math ${domain.body_pos} + 0.25*${var.H_num}
pos_05H: !math ${domain.body_pos} + 0.5*${var.H_num}
pos_1H: !math ${domain.body_pos} + 1.0*${var.H_num}
pos_2H: !math ${domain.body_pos} + 2.0*${var.H_num}
pos_3H: !math ${domain.body_pos} + 3.0*${var.H_num}
pos_4H: !math ${domain.body_pos} + 4.0*${var.H_num}
pos_5H: !math ${domain.body_pos} + 5.0*${var.H_num}
var:
H_num: !math 7*${domain.scale}
simulations:
- name: flowThroughTrees
save_path: ./tests/validation/results/10_flow_through_trees
n_steps: 40000
report:
frequency: 500
domain:
domain_size:
x: 600
y: 144
z: 64
block_size: 8
point_clouds:
tree:
IBM:
run: True
cfg_use: tree_cfg
order: 1
interval_run:
end_step: 0
start_step: 0
csv_path: fixture/point_clouds/cube_2x74x6.csv
transformation:
scale: !math ["${domain.scale}", "${domain.scale}", "${domain.scale}"]
translation: !math ["${domain.body_pos}", 72, "1.0+${domain.plane_height}"]
bodies:
full_plane:
IBM:
run: True
cfg_use: category_II
order: 0
lnas_path: fixture/lnas/wind_tunnel/full_plane.lnas
small_triangles: add
transformation:
translation: !math [0, 0, "${domain.plane_height}"]
plates_obstacles:
IBM:
order: 1
lnas_path: fixture/lnas/wind_tunnel/category_II/plates_Nx160Ny70_6x2_spacing16x32_offset19y.lnas
volumes_limits:
body_transformed:
- start: !math [10, 20, 0]
end: !math [120, 124, 64]
small_triangles: add
transformation:
translation: !math [0, 1, "${domain.plane_height}"]
scale: !math [4.0, 4.0, "2*32.0*${domain.scale}"] #2m
refinement:
static:
default:
volumes_refine:
# - start: [0, 56, 2]
# end: [256, 88, 12]
# lvl: 3
# is_abs: true
- start: [0, 34, 0]
end: [288, 110, 24]
lvl: 2
is_abs: true
- start: [0, 0, 0]
end: [352, 144, 40]
lvl: 1
is_abs: true
data:
divergence: { frequency: 10 }
monitors:
fields:
rho_max:
macrs: [rho]
stats: [min, max]
interval: { start_step: 500, frequency: 50 }
instantaneous:
full_domain:
{ interval: { frequency: 10000 }, macrs: [rho, u, omega_LES, f_IBM] }
statistics:
interval: { frequency: 10, start_step: 10000 }
macrs_1st_order: [rho, u]
macrs_2nd_order: [u]
exports:
full_domain: { interval: { frequency: 10000 } }
probes:
historic_series:
velocities:
macrs: ["u"]
interval: { frequency: 10, lvl: 0 }
points:
velocity_probe:
pos:
!math [
"${domain.body_pos}-50*${domain.scale}",
72,
"${domain.plane_height} + 7*${domain.scale}",
]
lines:
inlet_profile:
dist: 0.25
start_pos: !math [0, 72.0, "${domain.plane_height}"]
end_pos: !math [0, 72.0, "${domain.plane_height} + 14*${domain.scale}"]
velocity_profile:
dist: 0.25
start_pos:
!math [
"${domain.body_pos}-50*${domain.scale}",
72.0,
"${domain.plane_height}",
]
end_pos:
!math [
"${domain.body_pos}-50*${domain.scale}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_025H:
dist: 0.25
start_pos: !math ["${domain.pos_025H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_025H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_05H:
dist: 0.25
start_pos: !math ["${domain.pos_05H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_05H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_1H:
dist: 0.25
start_pos: !math ["${domain.pos_1H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_1H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_2H:
dist: 0.25
start_pos: !math ["${domain.pos_2H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_2H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_3H:
dist: 0.25
start_pos: !math ["${domain.pos_3H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_3H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_4H:
dist: 0.25
start_pos: !math ["${domain.pos_4H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_4H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
pos_5H:
dist: 0.25
start_pos: !math ["${domain.pos_5H}", 72.0, "${domain.plane_height}"]
end_pos:
!math [
"${domain.pos_5H}",
72.0,
"${domain.plane_height} + 14*${domain.scale}",
]
models:
precision:
default: single
LBM:
tau: 0.500011
vel_set: D3Q27
coll_oper: RRBGK
initialization:
sem_field: true
engine:
name: CUDA
BC:
periodic_dims: [false, false, false]
BC_map:
- pos: E
BC: RegularizedNeumannOutlet
rho: 1.0
wall_normal: E
order: 2
- pos: F
BC: Neumann
wall_normal: F
order: 1
- pos: B
BC: RegularizedHWBB
wall_normal: B
order: 1
- pos: N
BC: Neumann
wall_normal: N
order: 0
- pos: S
BC: Neumann
wall_normal: S
order: 0
SEM:
eddies:
lengthscale: { x: 20, y: 20, z: 20 }
domain_limits_yz:
start: [20, -20]
end: [124, 40]
profile:
csv_profile_data: "fixture/SEM/category_vprofile/profile_log_cat4_H150_Uh0.06.csv"
z_offset: !math "${domain.plane_height}"
K: 1.0
LES:
model: Smagorinsky
sgs_cte: 0.17
IBM:
body_cfgs:
tree_cfg:
n_iterations: 1
forces_factor: !math 1.6*1.16
kinetic_energy_correction: true
category_II:
n_iterations: 3
forces_factor: 0.5
wall_model:
name: EqLog
dist_ref: 3.125
dist_shell: 0.125
start_step: 5000
params:
z0: !math "0.01*${domain.scale}"
TDMA_max_error: 1e-04
TDMA_max_iters: 10
TDMA_min_div: 51
TDMA_max_div: 51
default: {}